笔者在[1,2]中已经对darknet如何进行配置解析进行了讲解,现在我们需要将解析出来的配置进行对应的网络层构建。
前言
笔者在[1,2]中已经对darknet如何进行配置解析进行了讲解,现在我们需要将解析出来的配置进行对应的网络层构建。如有谬误请联系指出,本文遵守CC 4.0 BY-SA版权协议,转载请联系作者并注明出处,谢谢。
e-mail: FesianXu@gmail.com
QQ: 973926198
github: https://github.com/FesianXu
知乎专栏: 计算机视觉/计算机图形理论与应用
微信公众号:

在阅读本文之前,请确保已经阅读过以下系列文章,否则可能会有前置知识点的缺失:
本文接着以上的文章,继续讨论如何根据解析出来的网络配置去构建网络结构network。为了讨论一致性,此处需要贴出[2]中的code 1.1,后续需要参考这段代码进行讨论。1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84
85
86
87
88
89
90
91
92
93
94
95
96
97network *parse_network_cfg(char *filename)
{
list *sections = read_cfg(filename); // 解析cfg配置文件,返回配置链表,如Fig 1.1所示
node *n = sections->front; // 获取sections的首节点,一般是[network]或者[net]类型的section
if(!n) error("Config file has no sections"); // 判断是否存在section
network *net = make_network(sections->size - 1); //构建network,其中的sections->size是包括了[net]之后的长度,因此要减去1,一共有sections->size-1层。
net->gpu_index = gpu_index;
size_params params; // 该数据结构承担了初始化网络结构,参数的重任,该结构体的定义如code 1.2所示。
section *s = (section *)n->val;
// 取得第一个section节点的指针,因为第一个section一般是一些全局的配置,具体见[1]。
list *options = s->options; // 第一个section内容负载中的双向链表
// 第一个section类型必须是[net]或者[network]
if(!is_network(s)) error("First section must be [net] or [network]");
// 如果没啥问题,就开始解析网络的全局配置,也即是[net]中的内容,将解析出的内容赋值到net数据结构中
parse_net_options(options, net);
params.h = net->h;
params.w = net->w;
params.c = net->c;
params.inputs = net->inputs;
params.batch = net->batch;
params.time_steps = net->time_steps;
params.net = net;
// 这一段都是在对对应的值进行赋值,没太多可说的
size_t workspace_size = 0;
// workspace_size 指明了所有层(layer)中最大的内存需求,从而提前开辟出整块内存以便后续计算,同一时间内,GPU或者CPU只有一个层在计算,因此只需要满足最大内存需求即可。
n = n->next; // 我们已经把[net]结构体解析完啦,现在我们考虑之后的层,一般就是实际的神经网络层了。
int count = 0;
free_section(s);
fprintf(stderr, "layer filters size input output\n");
while(n){ // 当 NULL == n 的时候退出解析
params.index = count; // 每一层的计数器,从0开始
fprintf(stderr, "%5d ", count);
s = (section *)n->val; // 每一层的实际负载,也即是section本体
options = s->options; // 实际section的双向链表,其中的元素
layer l = {0}; // 解析出的section将初始化到layer中,此处先定义layer。
LAYER_TYPE lt = string_to_layer_type(s->type); // 将字符串格式的层名,比如[convolutional]等解析为枚举类型的数据
// 针对不同类型的层lt,有着不同的解析函数,格式为 parse_xxxx(options, params),我们后续以卷积层为例子,其他层也是类似的。
if(lt == CONVOLUTIONAL){
l = parse_convolutional(options, params);
}else if(lt == DECONVOLUTIONAL){
l = parse_deconvolutional(options, params);
}
....
// 为了简便,这里省略了很多相似的parse解析函数,分别解析不同的层
else if(lt == DROPOUT){
l = parse_dropout(options, params);
l.output = net->layers[count-1].output;
l.delta = net->layers[count-1].delta;
}else{
fprintf(stderr, "Type not recognized: %s\n", s->type);
}
l.clip = net->clip;
l.truth = option_find_int_quiet(options, "truth", 0);
....
// 这里省略了类似的参数解析过程
l.learning_rate_scale = option_find_float_quiet(options, "learning_rate", 1);
l.smooth = option_find_float_quiet(options, "smooth", 0);
// 针对每个特定层,还可以指定其特定的学习率learning_rate,是否停止梯度stopbackward,平滑smooth,保存参数与否dontsave,加载参数与否dontload,等细节参数,这些参数将会在该层覆盖全局[net]的设置。这里的代码在解析这些参数。
option_unused(options); // 将没有使用到的参数打印(因为有可能cfg文件写错了,某些层不需要某些参数,但是又多写了,这里需要提示出来)
net->layers[count] = l; // 将解析得到的layer赋值到network中。
if (l.workspace_size > workspace_size) workspace_size = l.workspace_size;
// 每个特定层,需要的内存空间是不一样的,这个在定义某个层的时候是需要预先定义(计算)出来的,通过这个代码纪录整个网络需要的最大内存空间。
free_section(s); // 释放解析临时内存
n = n->next; // 走,哥们我们去下一个section
++count;
if(n){
params.h = l.out_h;
params.w = l.out_w;
params.c = l.out_c;
params.inputs = l.outputs;
}
}
free_list(sections);
layer out = get_network_output_layer(net); // 取得输出层的句柄
net->outputs = out.outputs;
net->truths = out.outputs;
if(net->layers[net->n-1].truths) net->truths = net->layers[net->n-1].truths;
net->output = out.output;
// 网络的输出就是输出层的最终输出
net->input = calloc(net->inputs*net->batch, sizeof(float));
// 给网络输入分配空间,大小取决于每个样本的维度net->inputs和批次大小net->batch
net->truth = calloc(net->truths*net->batch, sizeof(float));
// ground truths 的内存分配
if(workspace_size){
//printf("%ld\n", workspace_size);
net->workspace = calloc(1, workspace_size);
}
// 正如之前说的,在任意时刻 GPU或者CPU中只有一个层在运行,因此只需要预先分配所有层的最大内存需求即可了。
return net;
}
make_network
make_network处在code a1中#6行[3],是用来初始化一个network结构体的。代码很简单,如code 1.1所示1
2
3
4
5
6
7
8
9
10network *make_network(int n)
{
network *net = calloc(1, sizeof(network));
net->n = n; // 一共有多少网络层,不包括[net]或者[network]字段的section
net->layers = calloc(net->n, sizeof(layer)); // 对所有层进行内存分配
net->seen = calloc(1, sizeof(size_t));
net->t = calloc(1, sizeof(int));
net->cost = calloc(1, sizeof(float));
return net;
}
正如在[1]中谈到的,layer结构体内包含了所有神经网络层(卷积层,转置卷积层,激活层等等)的所有相关参数,因此可以看成是一个超大的数据结构,因此只需要初始化该数据就足够了。当然,这样设计出来的数据结构过于冗余,这又是后话了。
make_convolutional_layer
make_convolutional_layer在parse_convolutional中作为函数被调用,该函数用于构建卷积层,代码如code 2.1,同样为了简便起见,去掉了所有和CUDA和CUDNN相关的代码段,假设代码只运行在CPU上。1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57
58
59
60
61
62
63
64
65
66
67
68
69
70
71
72
73
74
75
76
77
78
79
80
81
82
83
84convolutional_layer make_convolutional_layer(int batch, int h, int w, int c, int n, int groups, int size, int stride, int padding, ACTIVATION activation, int batch_normalize, int binary, int xnor, int adam)
{
int i;
convolutional_layer l = {0};
l.type = CONVOLUTIONAL;
l.groups = groups;
l.h = h;
l.w = w;
l.c = c;
l.n = n; // 滤波器的数量
l.binary = binary;
l.xnor = xnor;
l.batch = batch;
l.stride = stride;
l.size = size;
l.pad = padding;
l.batch_normalize = batch_normalize;
// 卷积层的一系列超参数赋值
l.weights = calloc(c/groups*n*size*size, sizeof(float));
l.weight_updates = calloc(c/groups*n*size*size, sizeof(float));
// 对权值参数进行内存空间分配
l.biases = calloc(n, sizeof(float));
l.bias_updates = calloc(n, sizeof(float));
// 对偏置参数进行内存空间分配
l.nweights = c/groups*n*size*size;
l.nbiases = n;
// 权值参数和偏置参数的参数量大小
float scale = sqrt(2./(size*size*c/l.groups));
for(i = 0; i < l.nweights; ++i) l.weights[i] = scale*rand_normal();
// 权值参数随机初始化
int out_w = convolutional_out_width(l);
int out_h = convolutional_out_height(l);
// 确定卷积输出尺寸大小,具体见公式见(2.1)和code 2.2
l.out_h = out_h;
l.out_w = out_w;
l.out_c = n; // 滤波器的数量,相当于输出通道数`channel_out`
l.outputs = l.out_h * l.out_w * l.out_c; // 输出特征图的总维度
l.inputs = l.w * l.h * l.c; // 输入特征图的总维度
l.output = calloc(l.batch*l.outputs, sizeof(float)); // 对一个批次的输出特征图进行内存分配
l.delta = calloc(l.batch*l.outputs, sizeof(float)); // 对一个批次的更新中间量(见[1])进行内存分配,每个特征输出都对应一个,因此和l.outputs的维度一致。
l.forward = forward_convolutional_layer;
l.backward = backward_convolutional_layer;
l.update = update_convolutional_layer;
// 注册前向,反向和更新回调函数。
if(batch_normalize){
l.scales = calloc(n, sizeof(float));
l.scale_updates = calloc(n, sizeof(float));
for(i = 0; i < n; ++i){
l.scales[i] = 1;
}
l.mean = calloc(n, sizeof(float));
l.variance = calloc(n, sizeof(float));
l.mean_delta = calloc(n, sizeof(float));
l.variance_delta = calloc(n, sizeof(float));
l.rolling_mean = calloc(n, sizeof(float));
l.rolling_variance = calloc(n, sizeof(float));
l.x = calloc(l.batch*l.outputs, sizeof(float));
l.x_norm = calloc(l.batch*l.outputs, sizeof(float));
} // batch_norm 相关定义
if(adam){
l.m = calloc(l.nweights, sizeof(float));
l.v = calloc(l.nweights, sizeof(float));
l.bias_m = calloc(n, sizeof(float));
l.scale_m = calloc(n, sizeof(float));
l.bias_v = calloc(n, sizeof(float));
l.scale_v = calloc(n, sizeof(float));
} // adam相关定义
l.workspace_size = get_workspace_size(l); // 获取该层的workspace大小,见code 2.3
l.activation = activation;
fprintf(stderr, "conv %5d %2d x%2d /%2d %4d x%4d x%4d -> %4d x%4d x%4d %5.3f BFLOPs\n", n, size, size, stride, w, h, c, l.out_w, l.out_h, l.out_c, (2.0 * l.n * l.size*l.size*l.c/l.groups * l.out_h*l.out_w)/1000000000.); // 自说明输出
return l;
}
其中的convolutional_layer其实和layer是一致的,原因之前说过了,layer是一个冗余的超类。1
typedef layer convolutional_layer;
代码中需要根据pad和width/height,kernel_size,stride去确定卷积输出的尺寸大小,计算方式见公式(2.1)和code 2.2。 1
2
3
4
5
6
7
8
9int convolutional_out_height(convolutional_layer l)
{
return (l.h + 2*l.pad - l.size) / l.stride + 1;
}
int convolutional_out_width(convolutional_layer l)
{
return (l.w + 2*l.pad - l.size) / l.stride + 1;
}
1 | static size_t get_workspace_size(layer l){ |
代码中有三行很重要,是和后续的前向,反向计算,参数更新有关的:1
2
3
4l.forward = forward_convolutional_layer;
l.backward = backward_convolutional_layer;
l.update = update_convolutional_layer;
// 注册前向,反向和更新回调函数。
容易知道,每个不同的层,需要注册不同的这三类函数:1
2
3forward_xxx_layer(); // 用以定义该层的前向计算策略
backward_xxx_layer(); // 用以定义该层的反向计算策略
update_xxx_layer(); // 用以定义该层的参数更新策略
我们具体挑出来看看细节。
forward_xxx_layer
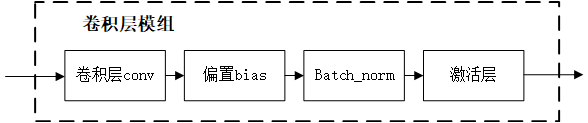
同样,我们以forward_convolutional_layer作为代表进行剖析,整个流程图如Fig 2.1所示,其中的im2col_cpu和gemm是作为卷积加速的一种常用方式,具体见[4],以下为了讨论简便,假设l.groups = 1。
1 | void forward_convolutional_layer(convolutional_layer l, network net) |
code 2.4中代码需要计算很多关于内存指针的偏移(因为物理内存上这些高阶张量都是线性排列的,具体高阶索引体现在特定的指针偏移上),比如#14和#16行都有(i*l.groups + j)这个偏移项,其实就是在考虑组别groups和不同批次batch对内存索引的影响,因为输入输出的特征图大小不同,因此后面接的系数当然也不同,分别是*n*m和*l.c/l.groups*l.h*l.w。
既然是卷积层的前向计算,其中最为关键的莫过于是如何进行卷积计算,我们首先关注im2col_cpu这个函数:1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34void im2col_cpu(float* data_im,
int channels, int height, int width,
int ksize, int stride, int pad, float* data_col)
{
/*
float* data_im: 输入的特征图指针,呈现线性排列,是拉直后的结果(物理内存就是线性的)
int channels: 输入通道数
int height, int width: 输入特征图的高度和宽度
int ksize: 卷积核大小
int stride: 步进
int pad: 填充
float* data_col: 经过im2col后的结果,将其保存在workspace中,因为能确保workspace的内存预分配大小符合最大内存需求,因此不担心其溢出。
*/
int c,h,w;
int height_col = (height + 2*pad - ksize) / stride + 1;
int width_col = (width + 2*pad - ksize) / stride + 1;
// 计算卷积核的尺寸参数
int channels_col = channels * ksize * ksize; // 将通道拉直后的向量维度,见[4]中的讨论
for (c = 0; c < channels_col; ++c) {
int w_offset = c % ksize;
int h_offset = (c / ksize) % ksize;
int c_im = c / ksize / ksize;
for (h = 0; h < height_col; ++h) {
for (w = 0; w < width_col; ++w) {
int im_row = h_offset + h * stride;
int im_col = w_offset + w * stride;
int col_index = (c * height_col + h) * width_col + w;
data_col[col_index] = im2col_get_pixel(data_im, height, width, channels,
im_row, im_col, c_im, pad);
}
}
}
// 计算K^2C的内循环,给data_col赋值
}
函数的细节太多了,我们后续博文再更新讨论细节,就宏观来看,该函数将三阶张量展开成了矩阵data_col。然后通过通用矩阵乘法gemm进行卷积核的相乘,就得到了最终的卷积特征输出。gemm代码如code 2.6所示,其中细节比较多,我们暂且不讨论,从darknet的源码来看,作者似乎并没有进行太多的矩阵乘法优化(有待后续继续验证),只是进行了openMP的多线程优化。gemm的传入参数比较多,因为通用矩阵乘法是在对式子(2.2)进行计算的 1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19void gemm(int TA, int TB, int M, int N, int K, float ALPHA,
float *A, int lda,
float *B, int ldb,
float BETA,
float *C, int ldc)
{
/*
参考式子(2.2)这里解释下参数
int TA, int TB: 是否需要使用转置的传入矩阵。
int M, int N, int K: 传入矩阵的尺寸
float ALPHA: 式子(2.2)中的\alpha
float BETA: 式子(2.2)中的\beta
float *A: 传入矩阵A
float *B: 传入矩阵B
float *C: 传入矩阵C
int lda, int ldb, int ldc: 表示的是leading dimension,也就是第一个维度的大小,可以看成是步进大小,用于做索引的时候确定元素的位置,比如add(A[i, j])=A+i*lda+j。这个细节我们可以暂时忽略。
*/
gemm_cpu( TA, TB, M, N, K, ALPHA,A,lda, B, ldb,BETA,C,ldc);
}
结合im2col和gemm,我们完成了卷积的前向计算。
backward_xxx_layer
梯度的反向传播计算的方向和前向计算相反,如Fig 2.1所示,将其反过来看得话,需要先求得激活层的梯度gradient_array()。笔者在之前的文章[5]中曾经简要介绍过卷积层的反向梯度传播,对于某个第1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
51
52
53
54
55
56
57void backward_convolutional_layer(convolutional_layer l, network net)
{
int i, j;
int m = l.n/l.groups;
int n = l.size*l.size*l.c/l.groups;
int k = l.out_w*l.out_h;
gradient_array(l.output, l.outputs*l.batch, l.activation, l.delta);
// 实现逐个参数的【激活层】的梯度计算以及累加,其中的l.delta可以实现训练过程中的梯度累加,也即是所谓的敏感度图sensitive map,见code 2.8,因为是反向传播因此由最底层的激活层开始计算
// 梯度累积通过l.delta进行传递
if(l.batch_normalize){
backward_batchnorm_layer(l, net);
} else {
backward_bias(l.bias_updates, l.delta, l.batch, l.n, k);
}
// 判断是否有bn层,进一步计算batch_norm的梯度或者bias的梯度,backward_batchnorm_layer内部包含了bias梯度反传
for(i = 0; i < l.batch; ++i){
for(j = 0; j < l.groups; ++j){
float *a = l.delta + (i*l.groups + j)*m*k;
float *b = net.workspace;
float *c = l.weight_updates + j*l.nweights/l.groups;
float *im = net.input + (i*l.groups + j)*l.c/l.groups*l.h*l.w;
float *imd = net.delta + (i*l.groups + j)*l.c/l.groups*l.h*l.w;
// 类似于前向传播,但是此时要考虑敏感性图(l.delta)变量了,因为需要累积梯度
if(l.size == 1){
b = im;
} else {
im2col_cpu(im, l.c/l.groups, l.h, l.w,
l.size, l.stride, l.pad, b);
} // 如果是1x1卷积,则不需要im2col,如果不是,通过im2col将im转换为col形式的矩阵b。b此时是workspace。im是上一层的输出,即是本层的输入。
gemm(0,1,m,n,k,1,a,k,b,k,1,c,n);
// 见公式(2.4),此处进行权值更新,激活层梯度是a,基础量是c,b是梯度
// 此处进行workspace的更新,保存当前梯度累积结果,以便于后续网络的训练。
if (net.delta) {
a = l.weights + j*l.nweights/l.groups;
b = l.delta + (i*l.groups + j)*m*k;
c = net.workspace;
if (l.size == 1) {
c = imd;
}
gemm(1,0,n,k,m,1,a,n,b,k,0,c,k);
if (l.size != 1) {
col2im_cpu(net.workspace, l.c/l.groups, l.h, l.w, l.size, l.stride, l.pad, imd);
} // 如果不是1x1卷积,那么通过col2im将其转换为张量结构。
}
}
}
}
更新参数的增量的公式如(2.4)所示,注意到此时还没有进行参数更新,只是进行参数更新量的计算而已,后续还需要考虑学习率进行衰减。其中的
code 2.8是计算激活层梯度的过程。1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21void gradient_array(const float *x, const int n, const ACTIVATION a, float *delta)
{
int i;
for(i = 0; i < n; ++i){
delta[i] *= gradient(x[i], a); // 计算激活层的梯度,并进行累积
}
}
float gradient(float x, ACTIVATION a)
{
switch(a){
case LINEAR:
return linear_gradient(x);
case LOGISTIC:
return logistic_gradient(x);
... // 省略了其他类似激活层的梯度
case LHTAN:
return lhtan_gradient(x);
}
return 0;
}
update_xxx_layer
在backward_xxx_layer层只计算了反向传播过程中的基于梯度考虑的参数更新量,后续在真正的参数更新过程中,还需要结合优化器的学习策略进行参数更新量的调整,这些都定义在了update_xxx_layer函数中,如code 2.9所示。1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33void update_convolutional_layer(convolutional_layer l, update_args a)
{
float learning_rate = a.learning_rate*l.learning_rate_scale; // 真实的学习率需要考虑衰减
float momentum = a.momentum; // SGD的动量
float decay = a.decay;
int batch = a.batch;
axpy_cpu(l.n, learning_rate/batch, l.bias_updates, 1, l.biases, 1);
scal_cpu(l.n, momentum, l.bias_updates, 1);
// 考虑bias的更新
if(l.scales){
axpy_cpu(l.n, learning_rate/batch, l.scale_updates, 1, l.scales, 1);
scal_cpu(l.n, momentum, l.scale_updates, 1);
}
// 考虑scale的更新以及动量的更新
axpy_cpu(l.nweights, -decay*batch, l.weights, 1, l.weight_updates, 1);
axpy_cpu(l.nweights, learning_rate/batch, l.weight_updates, 1, l.weights, 1);
scal_cpu(l.nweights, momentum, l.weight_updates, 1);
// 考虑weights的更新
}
void axpy_cpu(int N, float ALPHA, float *X, int INCX, float *Y, int INCY)
{
int i;
for(i = 0; i < N; ++i) Y[i*INCY] += ALPHA*X[i*INCX];
}
void scal_cpu(int N, float ALPHA, float *X, int INCX)
{
int i;
for(i = 0; i < N; ++i) X[i*INCX] *= ALPHA;
}
注意:其中axpy_cpu和scal_cpu都是BLAS中的命名方式,表示向量化数值运算,其中axpy_cpu表示a x plus y,也就是scal_cpu则是scale,即是
从中可发现,对于biases的更新策略是:
其中的learning_rate,batch size,bias_updates量,momentum。
对于weights的更新策略是: decay。
Reference
[1]. [darknet源码系列-1] darknet源码中的常见数据结构 : https://fesian.blog.csdn.net/article/details/109779812
[2]. [darknet源码系列-2] darknet源码中的cfg解析 : https://fesian.blog.csdn.net/article/details/109863764
[3]. https://github.com/pjreddie/darknet/blob/4a03d405982aa1e1e911eac42b0ffce29cc8c8ef/src/parser.c#L747
[4]. [卷积算子加速] im2col优化: https://fesian.blog.csdn.net/article/details/109906065
[5]. https://zhuanlan.zhihu.com/p/158736917